Robots y sus usos – Robótica , definición
Robots , Accionamientos de SMA para robots , Servoaccionamientos , Robot industrial Robótica , Explicación de la definición . Desglose de los robots , cómo funcionan …
El robot es un autómata universal para realizar movimientos, por lo que éstos se efectúan en determinados ejes. Se caracteriza por ser programable, realizar un gran número de acciones, tener sensores, tentáculos y herramientas.
Un robot industrial es una máquina automática, que representa un conjunto de potentes mecanismos y un sistema de control programable para realizar funciones motrices en un proceso de fabricación.
Obsah článku:
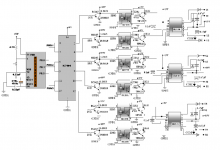
Diagrama de bloques de un robot industrial
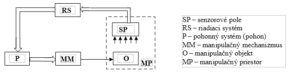
Campo de sensores (SP): los sensores informan del estado de los agregados del robot y de su entorno de trabajo. Se utilizan sistemas inductivos, capacitivos, ópticos, ultrasónicos, resistivos y otros.
Sistema de control (RS): proporciona el control de los accionamientos individuales que realizan su propio movimiento de manipulación y también la coordinación con el entorno, es decir, la escena tecnológica. El escenario tecnológico está formado por máquinas de trabajo, cintas transportadoras, equipos de posicionamiento u otros robots. El sistema de control incluye subsistemas de medición, control, mando, supervisión y diagnóstico. La síntesis de los circuitos de control garantiza la calidad necesaria del control del accionamiento en estados estáticos y dinámicos.
El sistema de propulsión -motor (P) – es una unidad que consta del motor, las líneas, los circuitos que garantizan el correcto funcionamiento del motor, el mecanismo de engranajes y un órgano de trabajo independiente. La transmisión garantiza un manejo preciso en el espacio y una velocidad y aceleración exactas.
Mecanismo de manipulación (MM): es una estructura mecánica formada por un conjunto de brazos. Los brazos se controlan de forma independiente y realizan movimientos de deslizamiento y rotación. El mecanismo de manipulación consta de un soporte con brazos , una mano o muñeca, un extremo del brazo con una pinza o un cabezal tecnológico.



Cabello graso : 5 remedios caseros
Pinza: permite sujetar la pieza con seguridad y trasladarla a la máxima velocidad del punto A al punto B.
Según la forma de agarre, los tentáculos se dividen en:
(a) con agarre pasivo:
– mecánicas (mordazas flexibles y apoyos)
– magnético ( imanes permanentes)
– vacío (ventosas de deformación)
(b) con prensión activa:
– mordazas mecánicas (con accionamiento hidráulico, neumático, electromagnético, electromotriz)
– magnético (electroimán)
– vacío o sobrepresión (dedos flexibles, cámaras de vacío)
Uso de sensores en vehículos de motor de corriente
División básica de accionamientos para robots
Los accionamientos para robots se dividen en:
(a) actuadores electrohidráulicos
(b) actuadores electroneumáticos
(c) accionamientos eléctricos
– accionamientos sin escobillas
– actuadores
Servoaccionamientos: representan el nivel más alto de control de sistemas de movimiento. La tarea del actuador es poner el mecanismo de trabajo accionado de la manera prescrita en el estado de movimiento para que el mecanismo de trabajo realice la operación tecnológica requerida o asegure el proceso tecnológico con la calidad requerida.
El servoaccionamiento consta de :
– sistema de control
– inversor eléctrico
– convertidor mecánico
– suministro eléctrico
– máquina de trabajo
– motor
Los servoaccionamientos pueden equiparse con:
– motores asíncronos
– motores síncronos
– motores paso a paso
Accionamientos de SMA para robots
Las aleaciones con memoria de forma (SMA) tienen la capacidad de «recordar» determinadas formas, incluso complicadas, y adoptarlas alternativamente al calentarse o enfriarse (en función del cambio de temperatura), con lo que realizan trabajo mecánico, pero sólo en una dirección cada vez. Se utiliza el denominado efecto de memoria unidireccional y bidireccional de compuestos intermetálicos como NiTi (níquel-titanio), CuZnAl (cobre-cinc-aluminio), CuAlNi (cobre-aluminio-níquel) y otros. El SMA se utiliza en actuadores robóticos en los que la posición puede determinarse mediante el control de la temperatura.
Los movimientos pueden controlarse mediante calefacción eléctrica. El SMA se utiliza en el campo de los microrobots, micromanipuladores, tentáculos, dedos artificiales y otros. El diseño de los actuadores de SMA es muy variado. Los tipos básicos son: alambre, varilla, fleje, muelle y forma general. El uso del cable SMA en la función de accionamiento se muestra en las siguientes figuras.
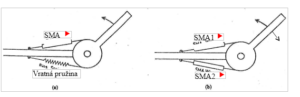
El primer accionamiento mostrado Fig. (a) utiliza un muelle de retorno u otro material flexible. Al calentar el hilo de SMA, el brazo se pone en movimiento y vuelve a su posición original gracias al muelle de retorno. En el segundo caso, Fig. b) hay dos cables SMA1 y SMA2, dependiendo del calentamiento de SMA1 y SMA2, el brazo se mueve hacia la derecha o hacia la izquierda.
En términos de diseño de actuadores SMA para un robot, las siguientes propiedades son críticas: la magnitud y repetibilidad de la deformación reversible (elongación), el rango de temperatura del fenómeno SMA, la magnitud de la fuerza, la carga admisible, el número alcanzable de ciclos de trabajo (por encima de 10.000), la magnitud de la respuesta temporal y el método de refrigeración.
En general, los actuadores de SMA pueden ejercer una gran fuerza en un recorrido relativamente pequeño. La adaptabilidad de la forma permite diseñar accionamientos a medida que, sin engranajes mecánicos, presentan una excelente relación potencia-peso. Son muy fiables y resistentes a entornos difíciles. Destacan en la zona de hasta 100 g y tienen un diseño sencillo.